[abstract]
- propose Search to Aggregate NEighborhood (SANE)
- automatically design data-specific GNN structures
- propose differentiable search algorithms
[1. Introduction]
- problem of GNN
- 모든 task에서 best performance를 내는 single model 없음
- 같은 task, 다른 dataset에서의 optimal model이 없음
-
현재: neighbors의 hiden feature를 aggregate하기 위해 같은 aggregation function으로 multiple layer을 stack한 모델
⇒ different combinations of aggregation functions 이 성능을 향상시킬 수 있음 (dubbed architecture challenge)
- NAS approcah for GNN
- example: GraphNAS, Auto-GNN: tackle the architeucture challenge
- approach: design the search space
- contains all hyperparameters related to GNN models (GraphNAS와 Auto-GNN)
- 문제1: GeniePath나JK-Network 포함하고 있지 않음 → best performance 보장 x
- 문제2: architecture search process가 too expensive
- contains all hyperparameters related to GNN models (GraphNAS와 Auto-GNN)
- 본질적인 문제: extremely expensive due to the trial-and-error nature (dubbed computational challenge)
- propose novel NAS framework, which tries to search to aggregate Neighborhood(SANE) for automatic architecture search in GNN
- contribution
- propose SANE framework based on NAS (emulate more human-designed GNN architectures)
- for computational challenge, propse differentiable architecture search algorithm
- trial-and-error based NAS approcah에 비교하여 효율적임
- first differentitable NAS approach for GNN
- applicable
[3. The proposed framework]
[A. The search space design]
- condition for search space
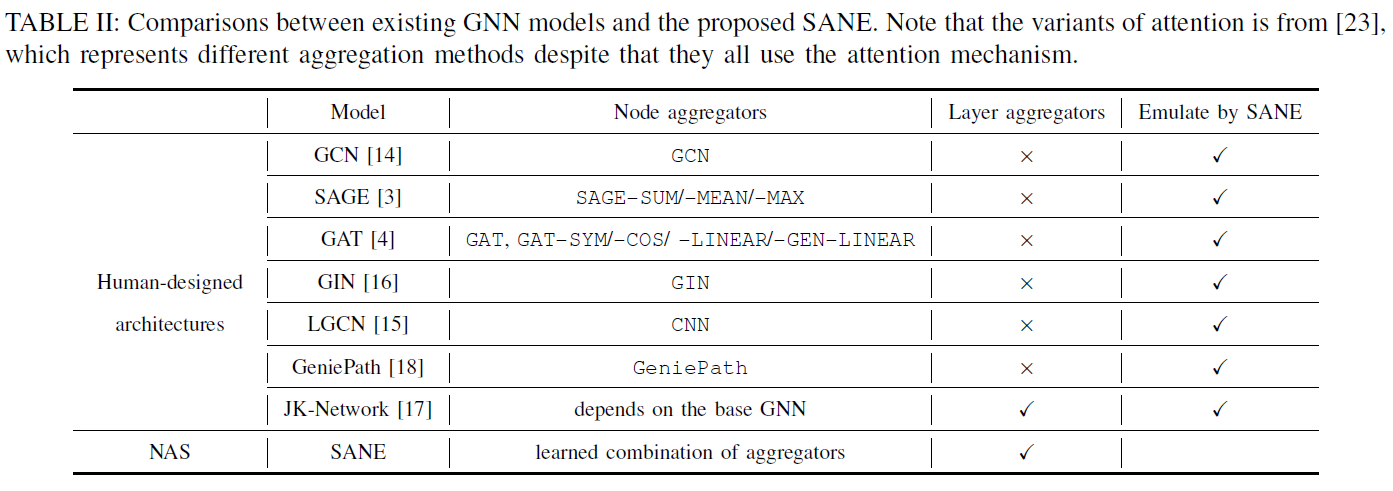
- large and expressive enough (emulate various existing GNN models)
- small and compact (compuational resources)
- components
-
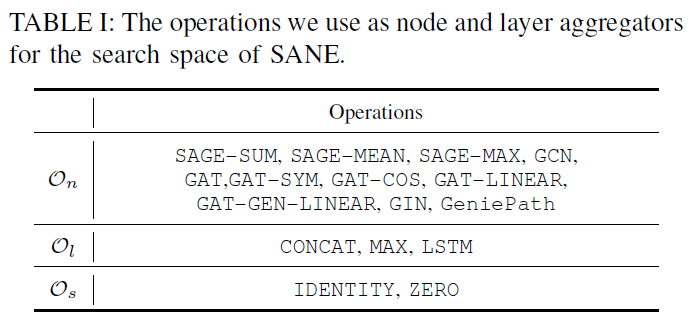
node aggregators: $\mathcal{O}_n$ below (11)
-
layer aggregators: $\mathcal{O}_l$ above (3) + $\mathcal{O}_s$ (skip-connection) above (2)
-
[B. Differentiable Architecture Search]
-
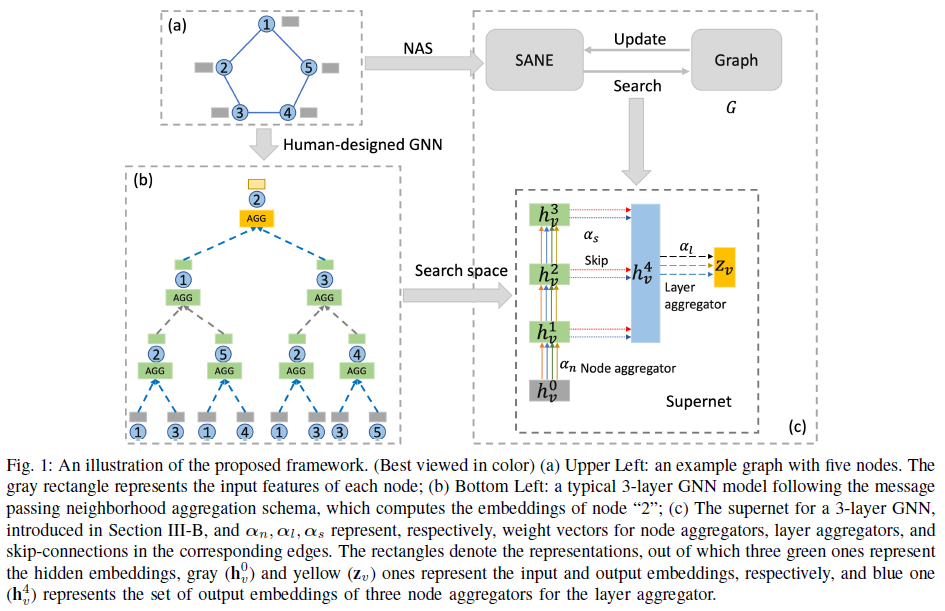
how to represent the search space of SANE as a supernet (DAG in Figure 1(c))
1) continuous relaxation of the search space
- Assume we use K-layer GNN with JK-Network as backbone
- Supernet has K+3 nodes, where each node $x^l$ is a latent representation (ex. input features of node, embeddings in the intermediate layers)
- each edge associated with an operation $o^{ij}$ (ex. GAT aggreagtor)
- One input node, one output node, one node representing all skipped intermediate layers ⇒ K+3 node in total
- task: find proper operation on each edge ⇒ discrete search space에서는 힘듦
-
softmax 를 사용하여 relax
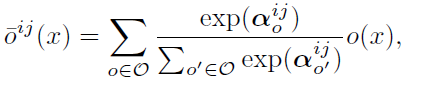
- $\bar{o}_n, \bar{o}_s, \bar{o}_l$: mixed operations from On, Ol, Os
-
neighborhood aggregation process by SANE

-
the mbedding of last layer
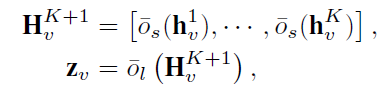
-
after obtain final representation of $z_v$, inject it to different types of loss epending on the given task. i.e. SANE-to solve a bi-level optimization problem:
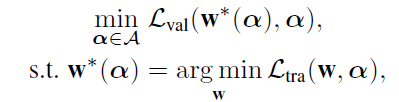
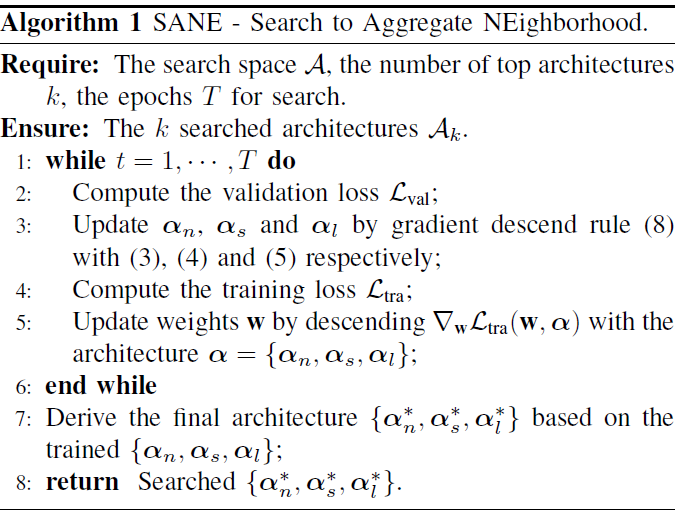
⇒ the task of architecture search by SANE=learn three continuous variables $\alpha_n$, $\alpha_s$, $\alpha_l$.
2) optimization by gradient descent

- instead of obtaining the optimized $w^*(\alpha)$, need to approximate it by adapting w using only a single training step
- retain top-k strongest operations
-
in the experient, k=1 for simplicity.

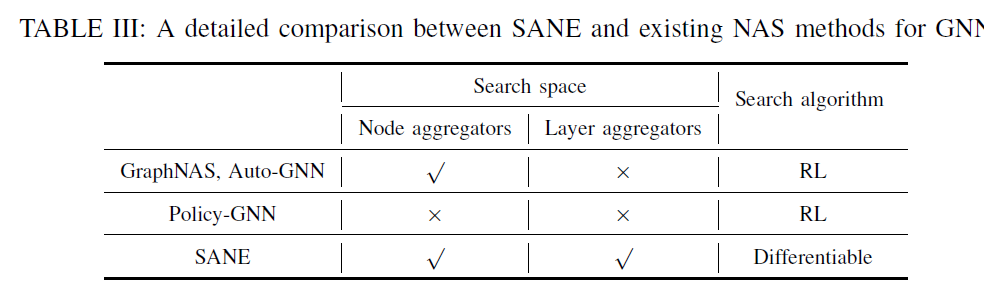
3) Comparison with Existing NAS methods
- SANE not include parameters like hidden embedding size, number of attention heads (hyperparameters of GNN models)
- focus on”aggregation functions”
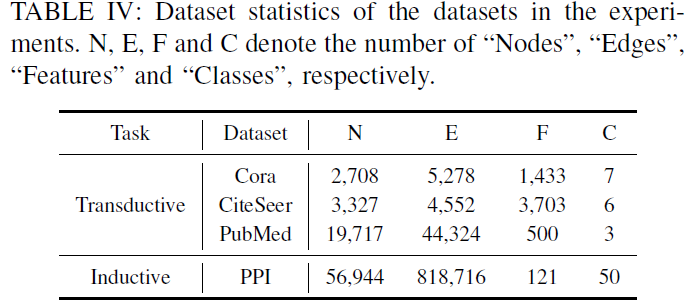
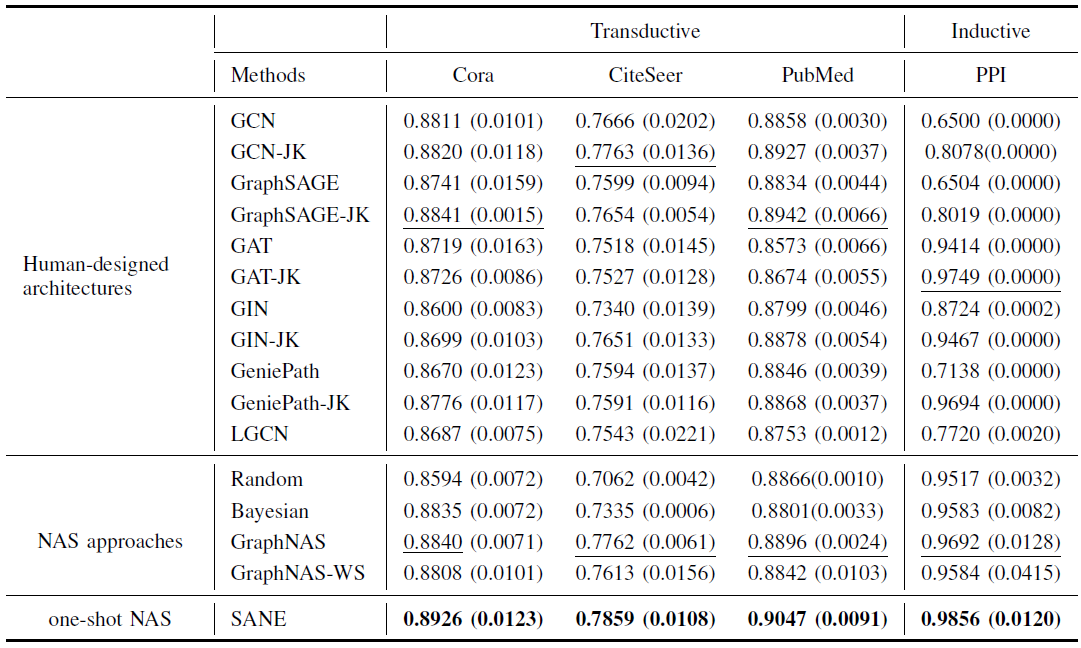
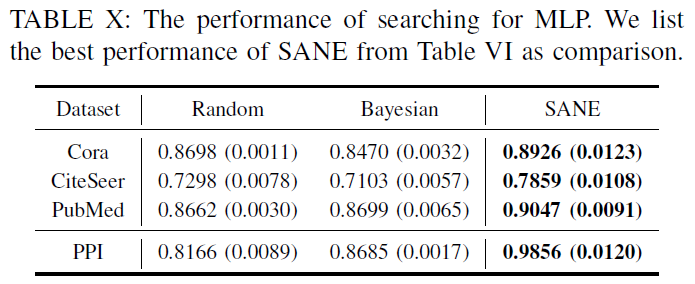
[4. Experiment]
[5. Conclusion]
- propose SANE for graph NAS