[Abstract]
- Hypergraph clustering
- O(log n) approximate algorithm for hypergraph ratio cut
- significantly faster than existing hypergraph ratio cut algorithms
[1. Introduction]
- minimize a ratio cut objective (ratio between the cluster’s cut and some notion of the cluster’s size)
- challenge to hypergraph
- more than one way to partition a hypergraph
⇒ notion of a generalized hypergraph cut function
- previous work and limitations
- extension to hypergraphs
- notions of graph laplacian operators are nonlinear → computational cost
- obtaining guarantees for generalized hypergraph cut function
- hypergraph algorithms
- theoretical O(n3)
- confined to simple notion of a hypergraph cut function
- recent techniques come with practical implmentation, not providing theoretical guarantees
- present work
- practical and general approximation algorithms for hypergraph ratio cuts
- worst-case O(log n) approximation
- applies to any cardinality-based submodular hypergraph cut function and any positive node weight function
- extension to hypergraphs
[2. Preliminaries and related work]
-
boundary of S

- cut(S)
-
ratio cut objective
- capture conductance when $\pi(u)=d_u$
- capture expansion when $\pi(u)=1$
-
$\pi$ -expansion of a graph G
- a graph is known as an expander graph if its expansion < c
- can be extended to directed graphs
[2.1 Graph flows]
- a nonegative flow value f(ij) to each (i,j)
- if f(i,j) ≤ w(i,j), then f satisfies capacity constraints
- satisfies flow constraints at a node v if flow into v == flow out of v
- out > in (deficit), in > out (excess)
- definition
- s-t flow
- multicommodity flow
[2.2 General hypergraph cuts and expansion]
-
boundary

-
all-or-nothing hypergraph cut function

-
generalized hypergraph cut
- each hyperedge e is associated with a splitting function $w_e : A\subset e \rightarrow \mathbb{R}$ that assigns a penalty for each way of seperating the nodes of a hyperedge
-
axioms
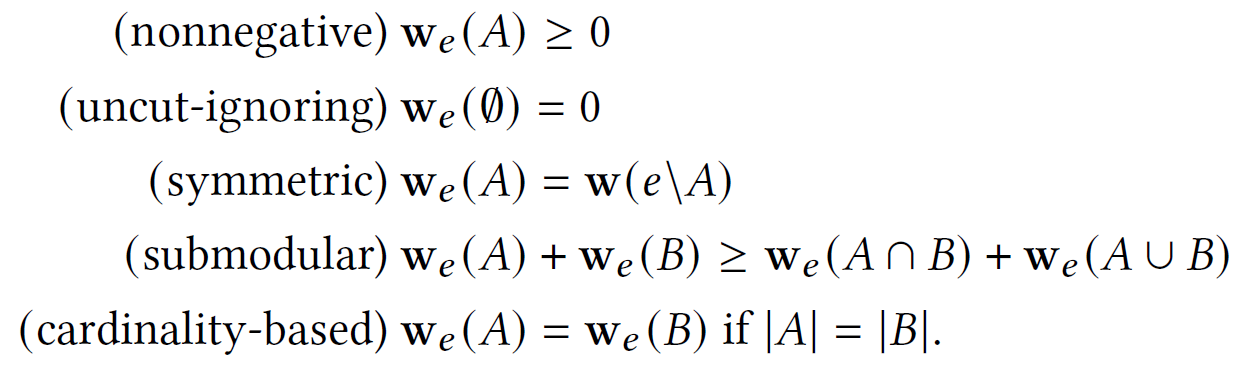
⇒ if satisfied, $cut_H$ is a cardinality-based submodular hypergraph cut function
-
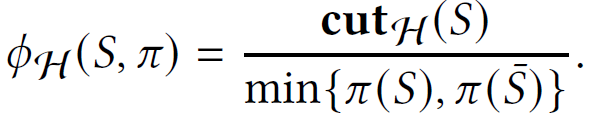
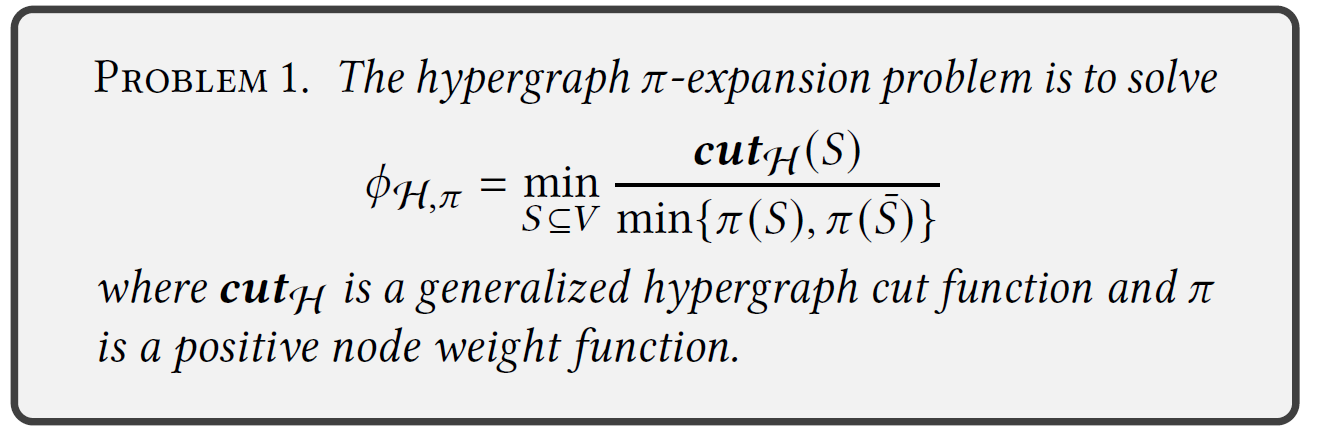
generalized hypergraph cut expansion
- given: a hypergraph, node weight function, generalized hypergraph cut function
-
the hypergraph $\pi$ -expansion of a set $S\subset V$:
[3. Hypergraph expander embeddings]
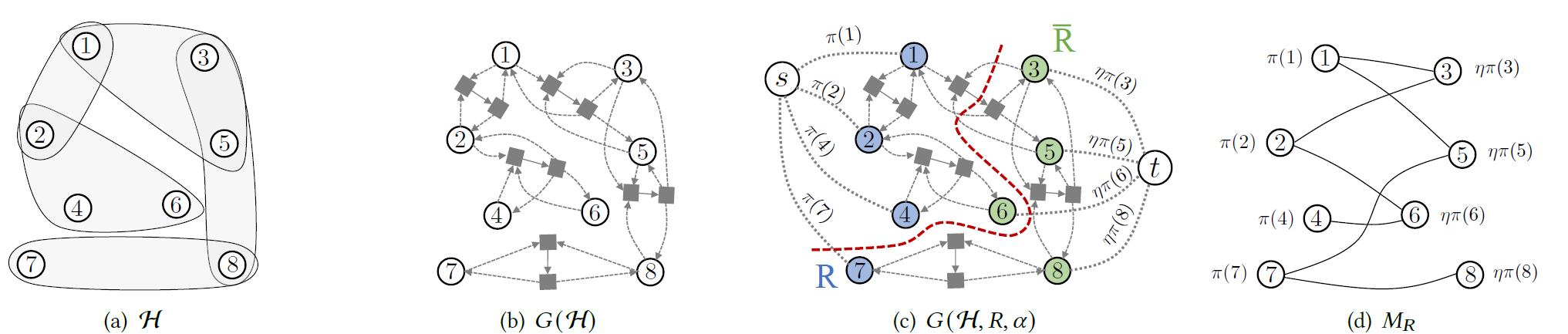
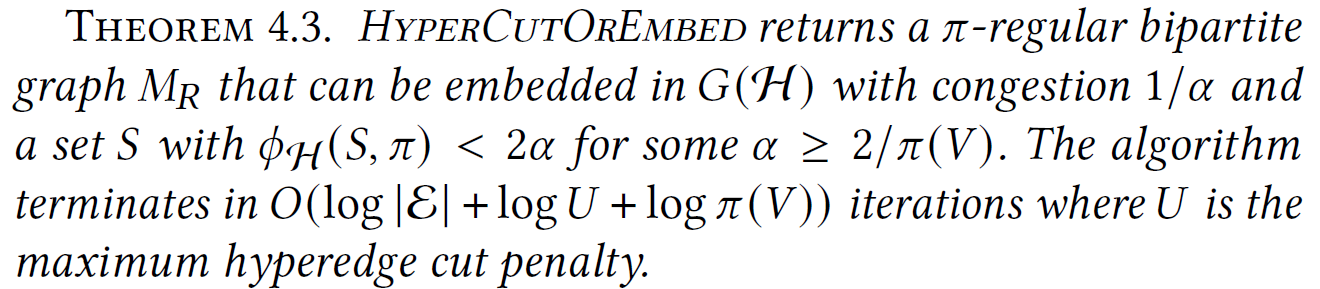
[3.1 Hypergraph cut preservers]
-
employ reducing a hypergraph to a graph
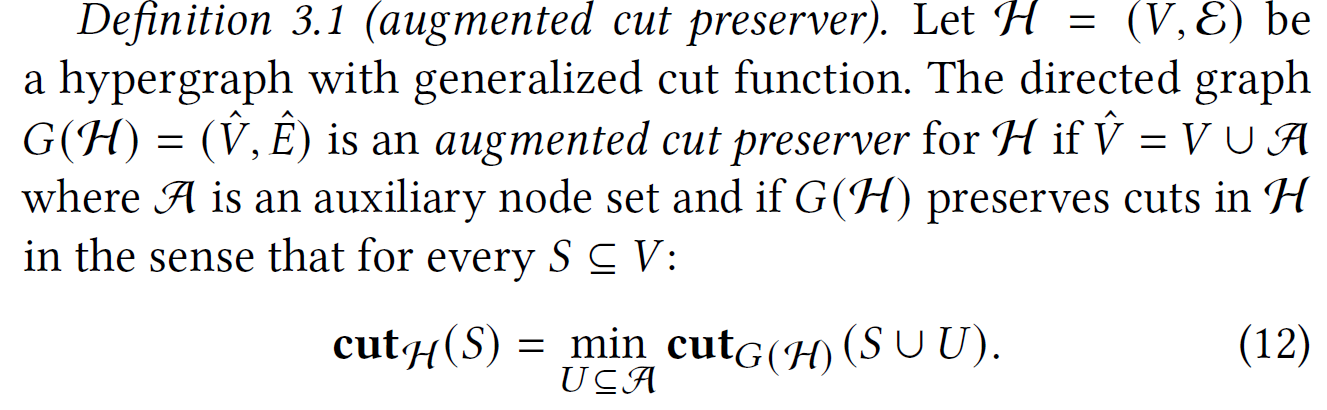
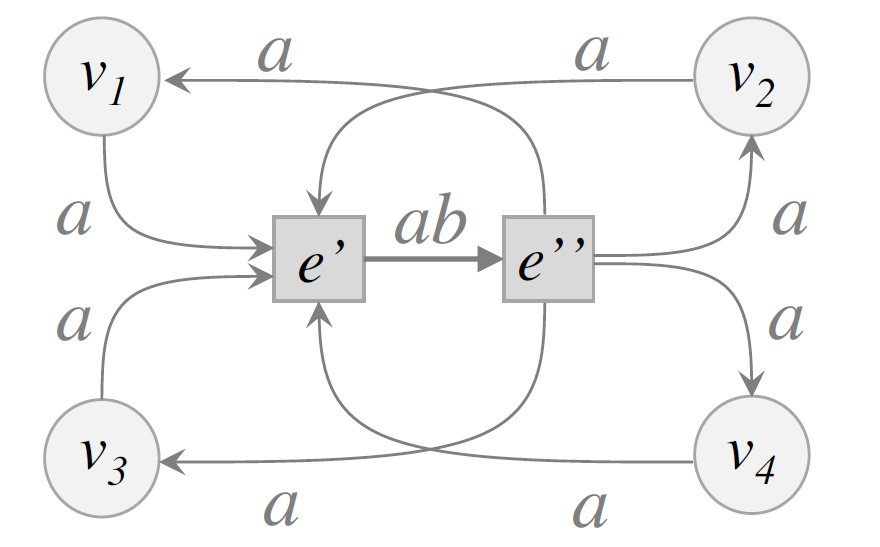
⇒ not unique method of constructing an augmented cut preserver for a cardinality-based submodular hypergraph cut function
[3.2 Expander embeddings in directed graphs]

[3.3 Hypergraph expander embeddings]
-
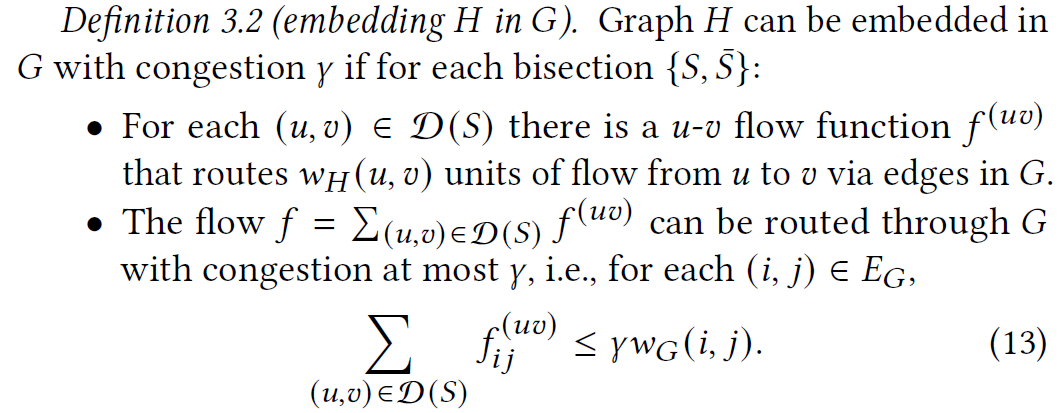
combine hypergraph cut preservers + definition 3.2
[4. Hypergraph flow embedding]
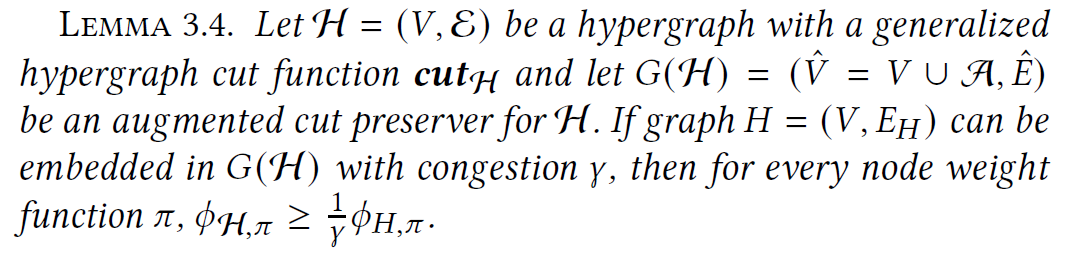
- to apply lemma 3.4, embed an expander into G(H) with a small congestion
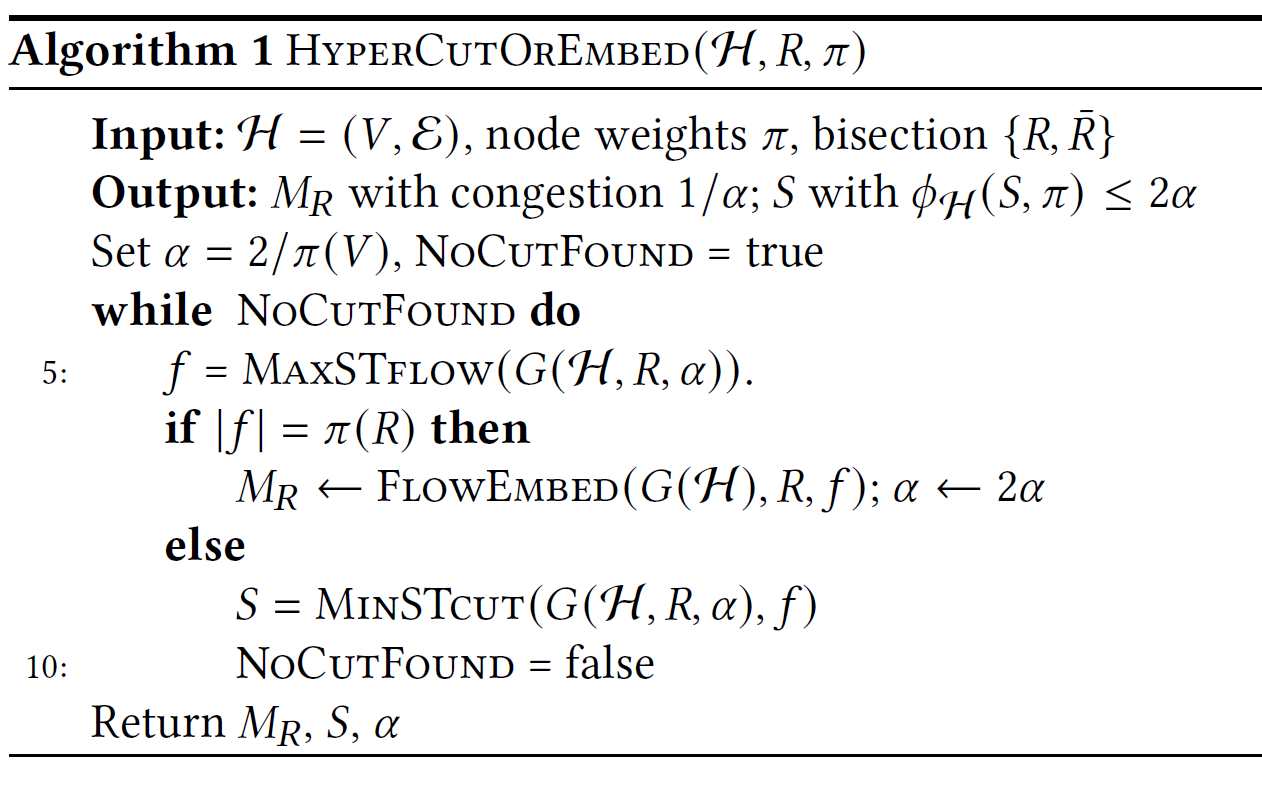
[4.1 Maximum flows in an auxiliary graph]
- fix a>0 and a partition ${R, \bar{R}}$ satisfying $\pi (R)\leq \pi (\bar{R})$, and set $n = \pi (R)/\pi (\bar{R})$
- solve maximum s-t flow problem on an auxiliary graph G(H, R, a)
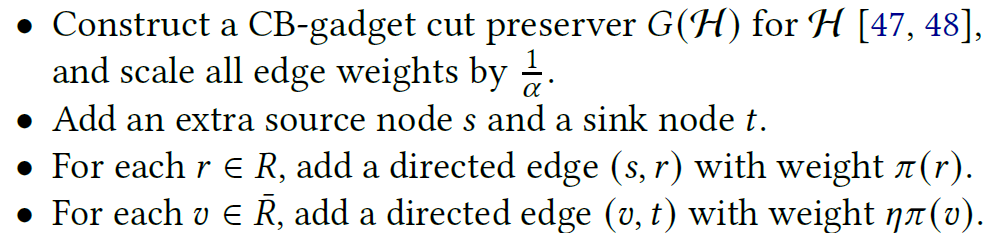
- find a set S with small expansion, or find an embeddable bipartite graph btw $R, \bar{R}$ with congiestion 1/a
-
minimum s-t cut problem in G(H, R, a) = solving the following optimization problem



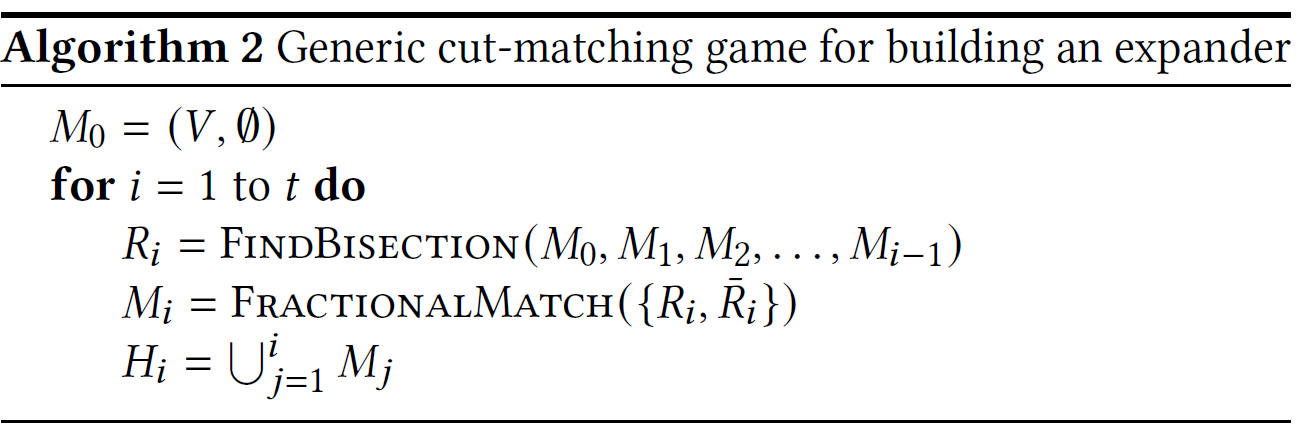
[4.2 The flow-embedding algorithm]
-
Algorithm 1: obtain both a good cut and an embeddable bipartite graph for any input parition ${R, \bar{R}}$ satisfying $\pi (R)\leq \pi (\bar{R})$
[5 Hypergraph ratio cut algorithms]
[5.1 Expander building subroutines]
- each iteration
- cut player : produce a bisection Rs
- matching player: produces a fractional perfect matching $M\in [0,1]^{\abs{V}\times \abs{V}}$ between Rs
- union of maching defines a graph $H_t = \bigcup_{j=1}^t M_j$ with adjacency matrix $A_t=\sum_{j=1}^t M_j$
- goal: choose bisections minimizing the number of rounds it takes before Ht is an expander
[5.2 The approximation algorithm]
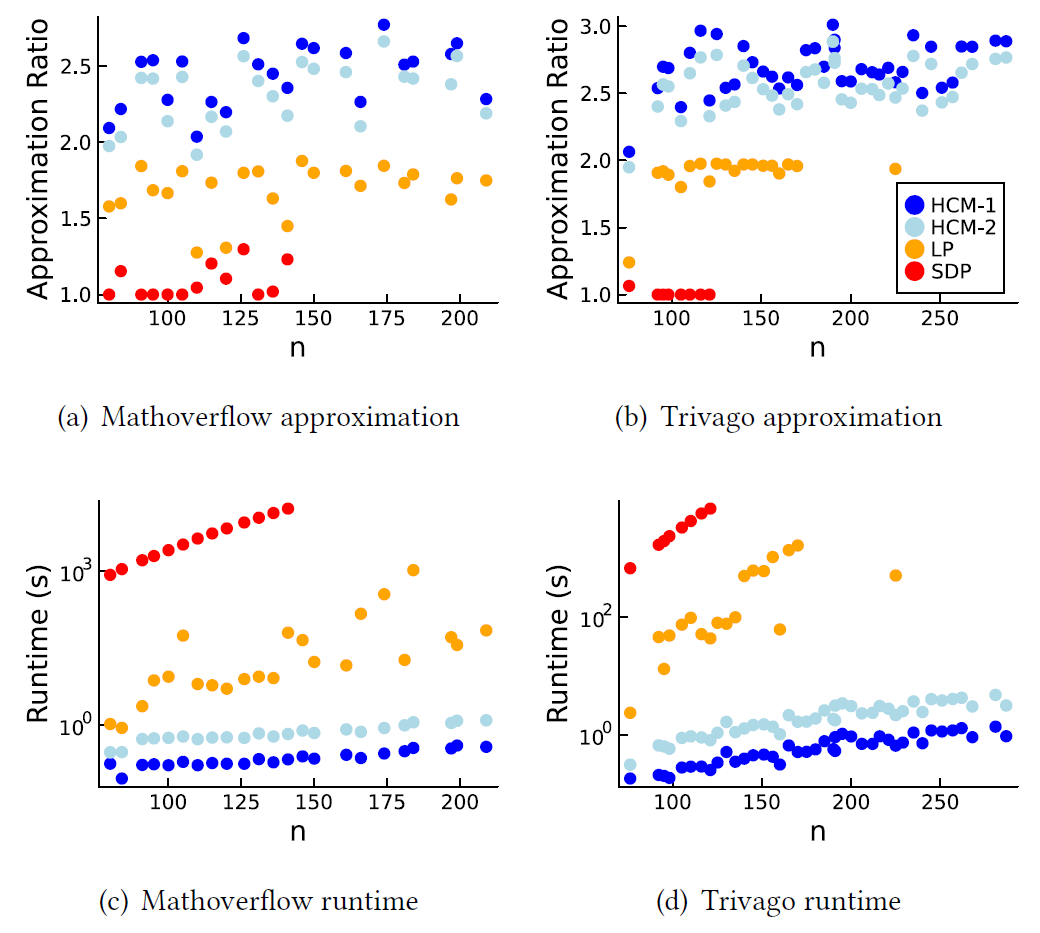
[6. Experiments]
[7. Discussion]
- explore best generalized hypergraph cut functions
- find improved approximation algorithmbeyond cardinality based